From 4db33f85d91e2f38cc052eb461dc7210170bd737 Mon Sep 17 00:00:00 2001 From: Jake Read <jake.read@cba.mit.edu> Date: Wed, 24 Jan 2018 00:45:26 -0500 Subject: [PATCH] links --- README.md | 10 +++++----- 1 file changed, 5 insertions(+), 5 deletions(-) diff --git a/README.md b/README.md index 3b0e6ff..50ca961 100644 --- a/README.md +++ b/README.md @@ -2,7 +2,7 @@ TinyNets is stateless, resilient multipath message passing for networked control systems. -See a longer report on the work (for 6.829) [here](https://gitlab.cba.mit.edu/jakeread/tinynets/blob/master/document/6-829_project-jr_dk_ns_pw_Tiny_Nets_finalReport.pdf). +See a longer report on the work (for 6.829) [here](https://gitlab.cba.mit.edu/jakeread/tinynets/raw/master/document/6-829_project-jr_dk_ns_pw_Tiny_Nets_finalReport.pdf). ## Networked Control Systems (NCS) @@ -30,17 +30,17 @@ TinyNet routers maintain a port forwarding table and update one-another on their We show that TinyNets recovers fairly well from the loss of nodes: - +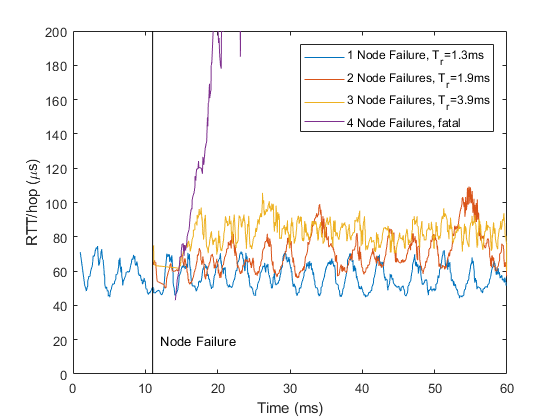 In addition, we developed TinyNets to run on small microcontrollers, that can simulatenously be used to do 'other stuff' - i.e. motor control, sensor reading, etc. - +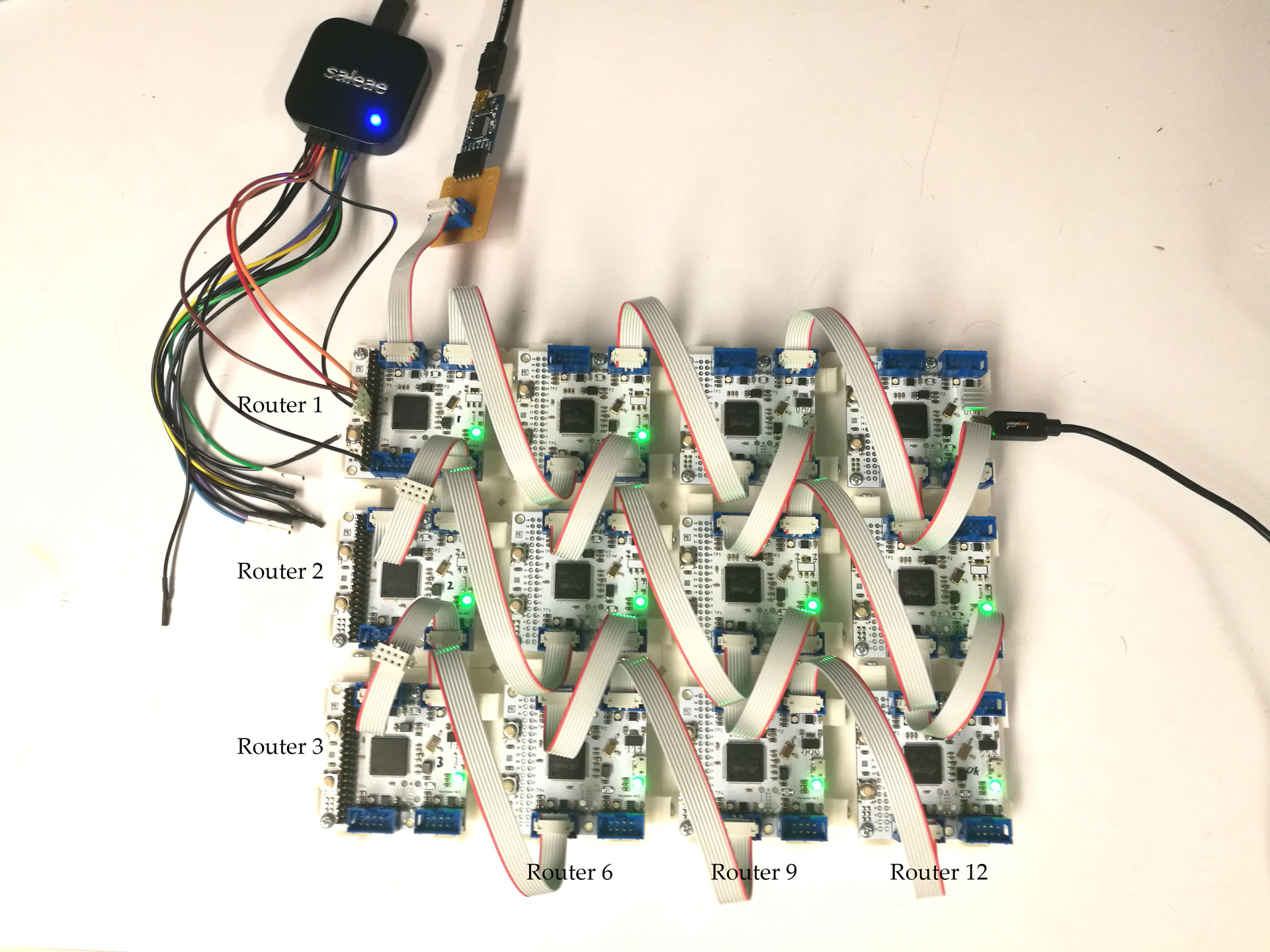 - +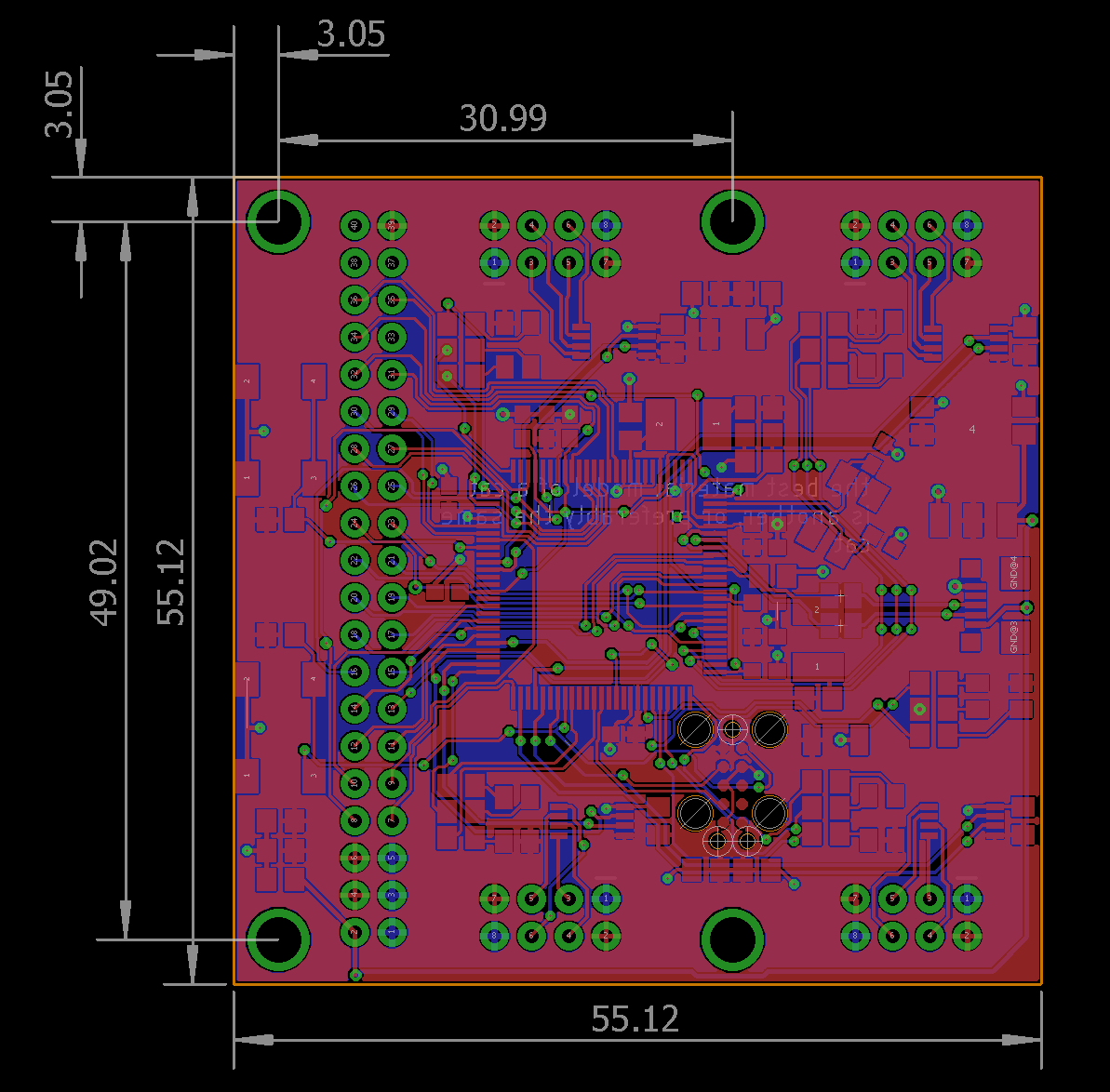 On the hardware we tested (a 300MHz embedded uc) we record a packet processing time<sup>3</sup> of about 37us. - +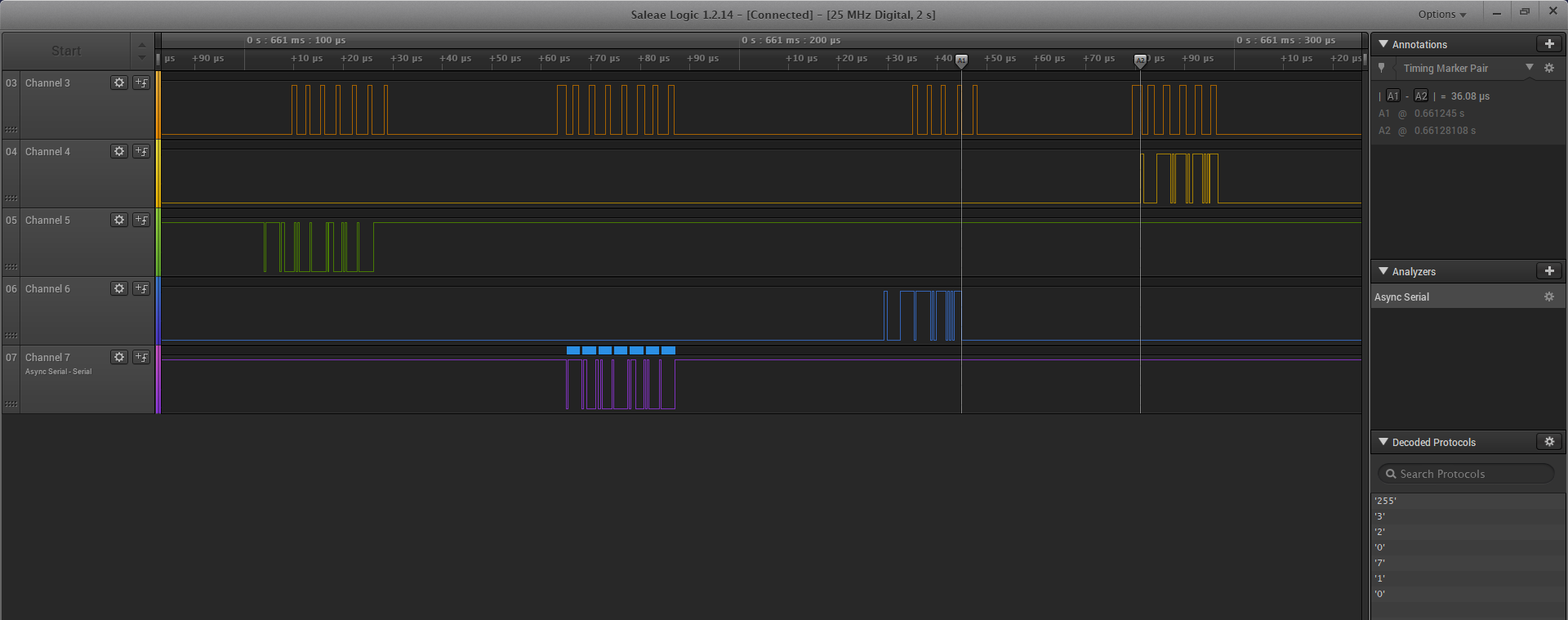 With a bitrate of about ~2MBPS we do a total per-hop time of ~ 100us. This means that between two nodes we can run a 10kHz control loop. -- GitLab