Commits on Source (8)
-
 Quentin Bolsee authored
Quentin Bolsee authored -
 Jake Read authored
Jake Read authored -
Quentin Bolsee authored
-
-
-
Jake Read authored
-
Jake Read authored
-
Jake Read authored
Showing
- CAD/belt_axis/belt_axis_kit.stl 0 additions, 0 deletionsCAD/belt_axis/belt_axis_kit.stl
- KIT.md 47 additions, 0 deletionsKIT.md
- LINKS.md 31 additions, 0 deletionsLINKS.md
- README.md 64 additions, 110 deletionsREADME.md
- TODO.md 12 additions, 34 deletionsTODO.md
- img/blot-clear-bg.png 0 additions, 0 deletionsimg/blot-clear-bg.png
- img/maxl-hello-world.jpg 0 additions, 0 deletionsimg/maxl-hello-world.jpg
- img/shaper_origin.webp 0 additions, 0 deletionsimg/shaper_origin.webp
- img/turn_by_wire.jpg 0 additions, 0 deletionsimg/turn_by_wire.jpg
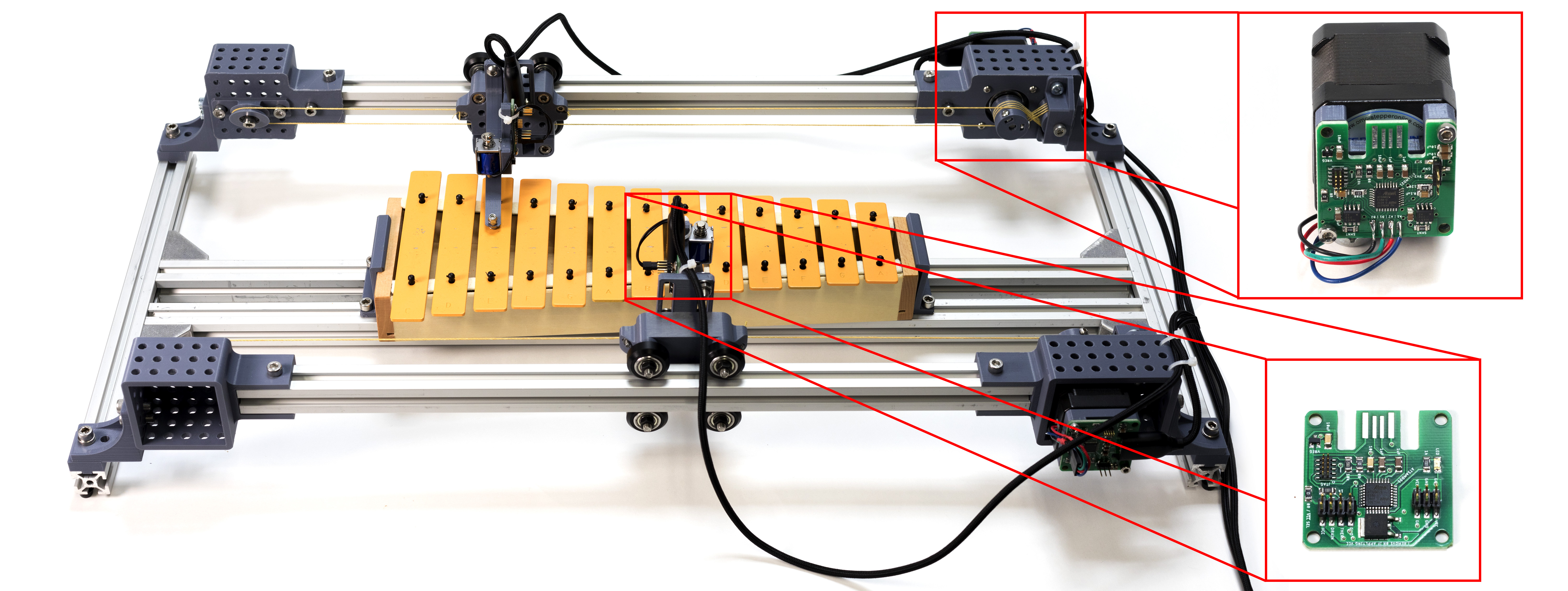
- img/xylophone_teaser.jpg 0 additions, 0 deletionsimg/xylophone_teaser.jpg
- recitation.md 56 additions, 0 deletionsrecitation.md
KIT.md
0 → 100644
LINKS.md
0 → 100644
img/blot-clear-bg.png
0 → 100644
{kind=link}

1.7 MiB
img/maxl-hello-world.jpg
0 → 100644
{kind=link}
242 KiB
img/shaper_origin.webp
0 → 100644
{kind=link}

467 KiB
img/turn_by_wire.jpg
0 → 100644
{kind=link}

413 KiB
img/xylophone_teaser.jpg
0 → 100644
{kind=link}
2.09 MiB
recitation.md
0 → 100644