
Showing
- KIT.md 43 additions, 44 deletionsKIT.md
- LINKS.md 8 additions, 15 deletionsLINKS.md
- README.md 96 additions, 61 deletionsREADME.md
- TODO.md 51 additions, 13 deletionsTODO.md
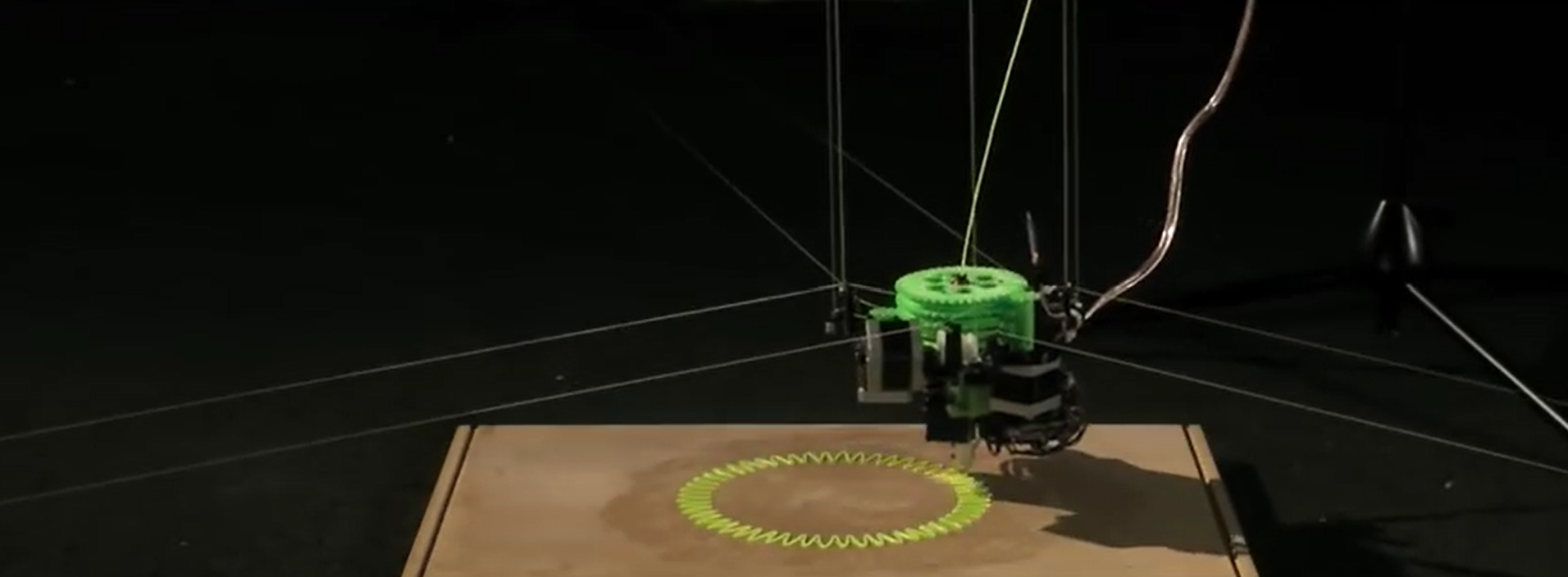
- img/gil-machine.png 0 additions, 0 deletionsimg/gil-machine.png
- img/hangprinter.png 0 additions, 0 deletionsimg/hangprinter.png
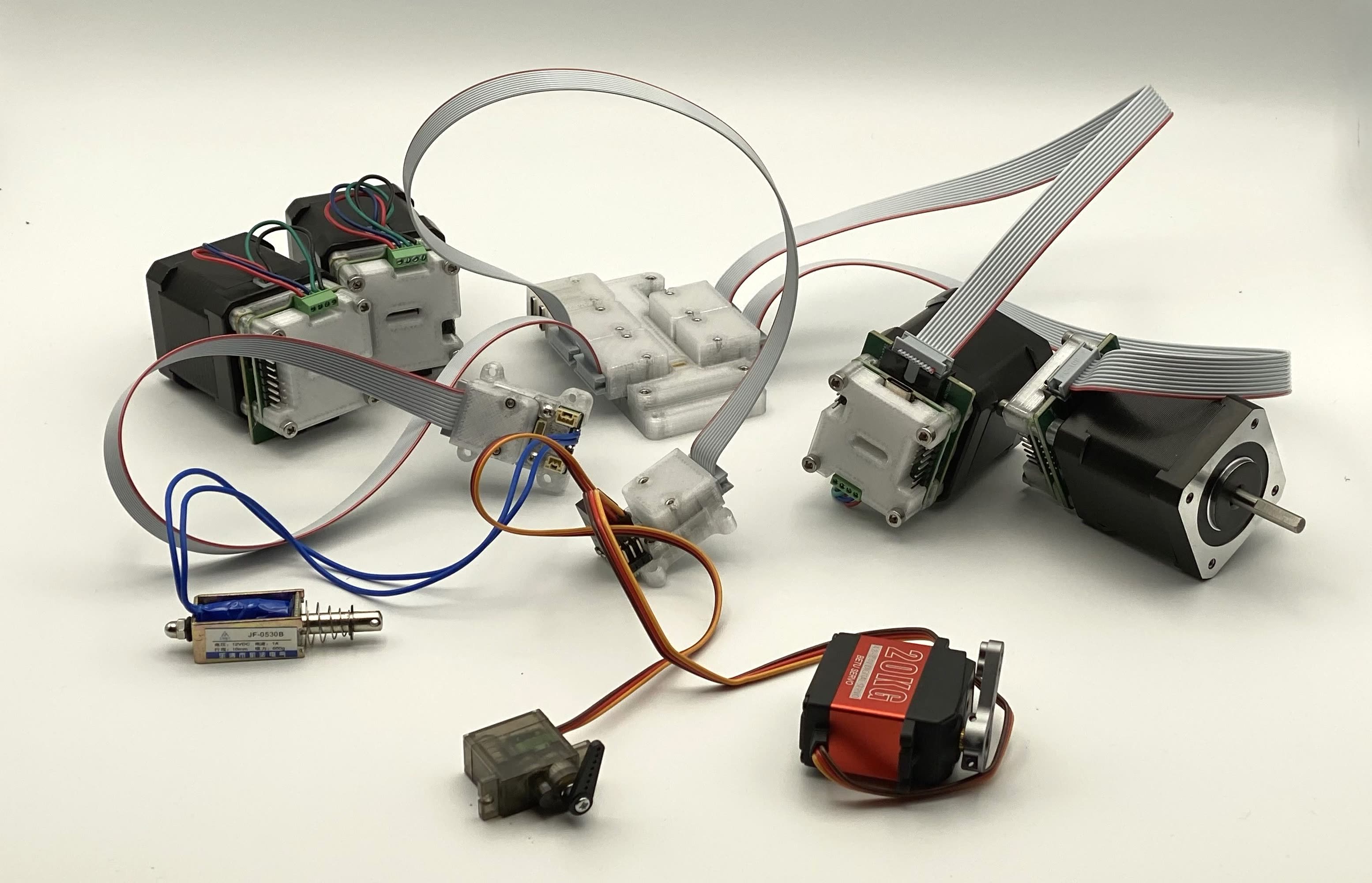
- img/kit-controller.jpg 0 additions, 0 deletionsimg/kit-controller.jpg
- img/robot-chainsaw.png 0 additions, 0 deletionsimg/robot-chainsaw.png
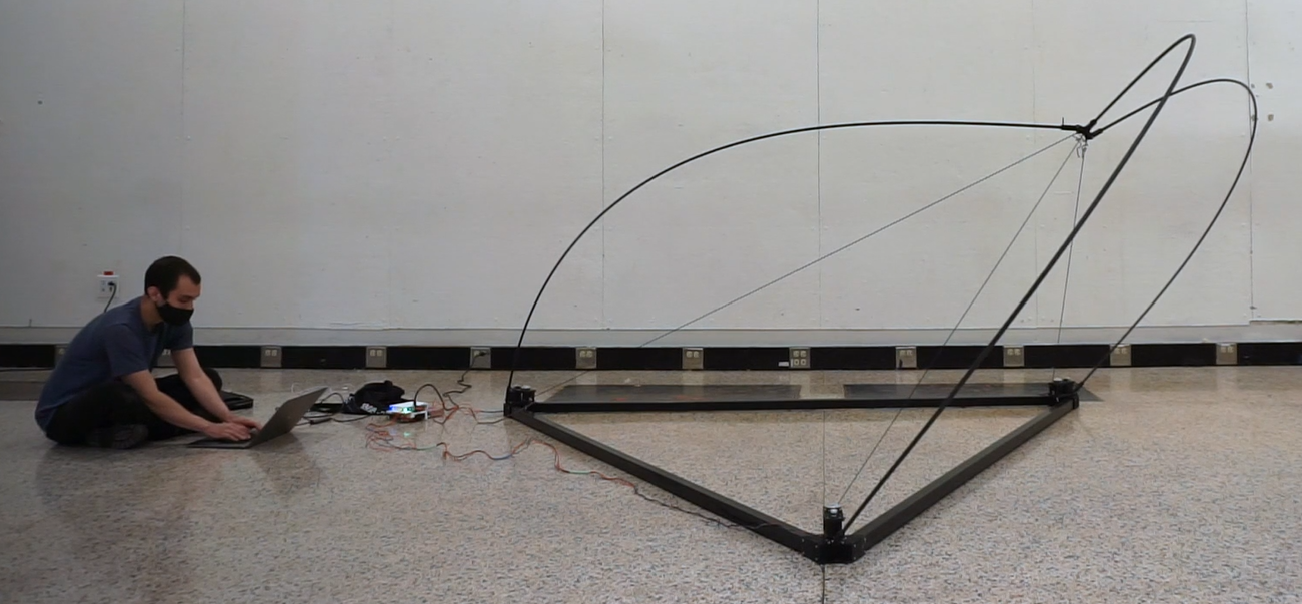
- img/robot-hoop.png 0 additions, 0 deletionsimg/robot-hoop.png
- img/scara.png 0 additions, 0 deletionsimg/scara.png
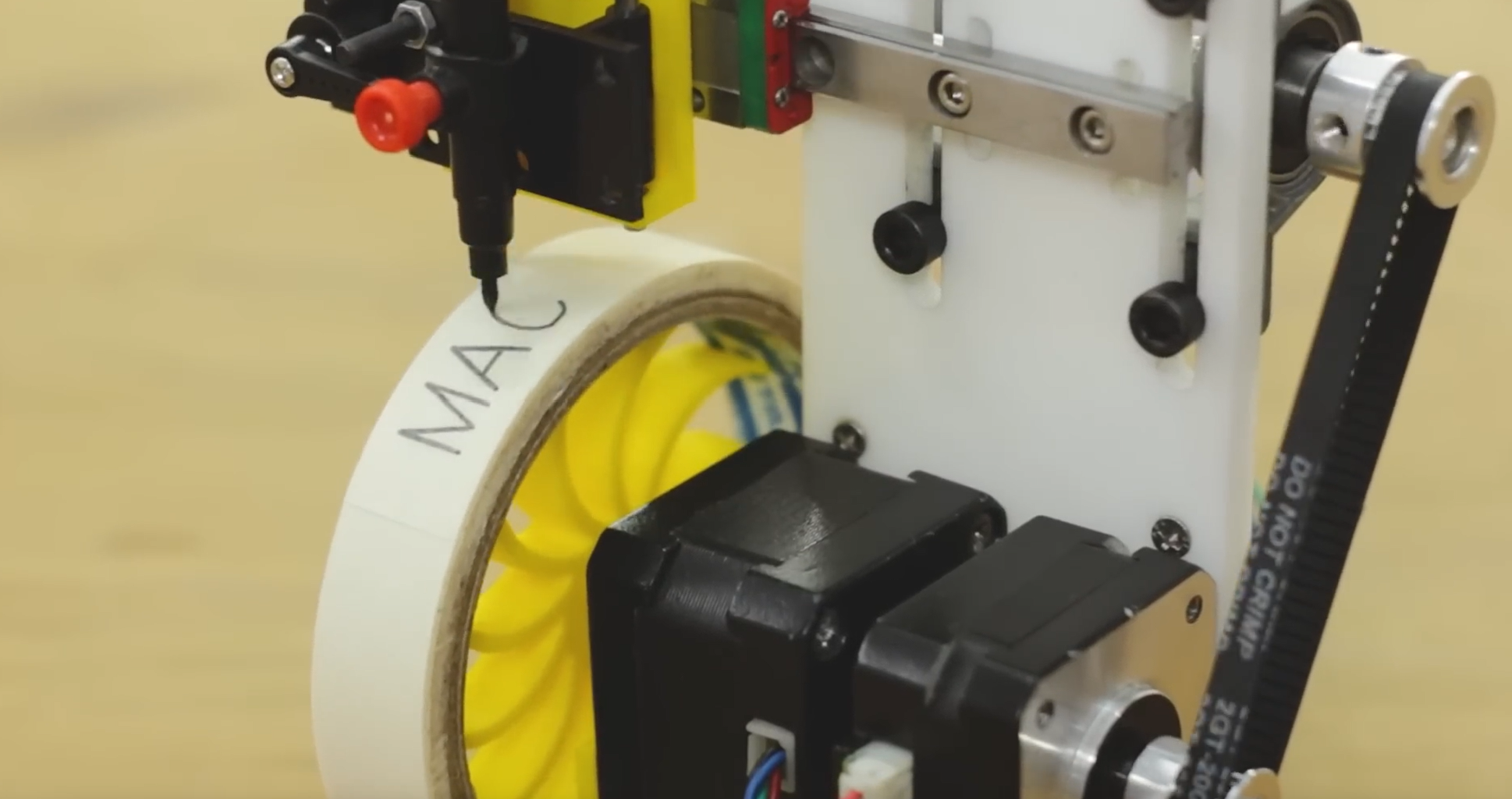
- img/tape-labels.png 0 additions, 0 deletionsimg/tape-labels.png
- img/wire-cutter.png 0 additions, 0 deletionsimg/wire-cutter.png
- img/xylo-wip.jpg 0 additions, 0 deletionsimg/xylo-wip.jpg
img/gil-machine.png
0 → 100644
{kind=link}
981 KiB
img/hangprinter.png
0 → 100644
{kind=link}
689 KiB
img/kit-controller.jpg
0 → 100644
{kind=link}
389 KiB
img/robot-chainsaw.png
0 → 100644
{kind=link}

2.61 MiB
img/robot-hoop.png
0 → 100644
{kind=link}

2.21 MiB
img/scara.png
0 → 100644
{kind=link}

1.9 MiB
img/tape-labels.png
0 → 100644
{kind=link}
1.38 MiB
img/wire-cutter.png
0 → 100644
{kind=link}
1.92 MiB
img/xylo-wip.jpg
0 → 100644
{kind=link}
1.07 MiB